Intro to AArch64 Architecture
The purpose of this document is to cover the basics of AArch64 (Cortex-A) architecture. This document is mainly intended for those with experience in system programming.
For ease of use, a lot of parallels will be drawn with x86 structures.
Registers
x0-x30- GP registers.x29is typically the frame pointer whilex30is the link register.PSTATE- the Processor State register - contains information like comparision flags, the current stack pointer being used (SP_EL0orSP_ELx), as well as interrupt flags.
Exception Levels
Exception Levels are the equivalent of privliege levels or “rings” in x86. There are 4 exception levels:
EL0 - Userspace
EL1 - Kernel
EL2 - Hypervisor
EL3 - Secure Monitor
EL0 and EL1 work similar to how they do in x86. EL2 is where the hypervisor operates as opposed to the VMX/VMCS stuff that happens in x86. EL3 is where the secure monitor operates. The Secure Monitor serves as an entry point to the secure world.
In this project, we are primarily working at the EL2 level with some calls being made to EL3.
Each exception level has its own stack pointer SP_ELx, its own page tables, TTBR0_ELx``(``EL1 is a special case which I will not discuss here).
System Registers
There are a variety of system registers used in AArch64. These system registers are written to using the msr instruction and read from using the mrs instruction. These registers are very similar to model specific registers in x86.
Transitioning Between Exception Levels
There are a variety of ways that one can transition between exception levels. The first way is via a direct call - similar to a system call.
To transition to EL1, we use the svc instruction. This is how syscalls are performed.
To transition to EL2, we use the hvc instruction. This is usually to faciliate hypercalls. This instruction may only be called from EL1 or above.
To transition to El3, we use the smc instruction. This is used to faciliate transitions to the secure world or call trustzone applications. This instruction may only be called from EL1 or above.
We may also transition on faults such as MMU faults, instruction alignment faults, etc. A full list for why we may transition to each Exception Level can be found below specifically in the EC table:
In addition to direct calls, we may also transition via an IRQ, FIQ, or an System Error (SError). The exception level that an IRQ or FIQ are taken to depends on whether or not certain configurations in HCR_EL2 and SCR_EL3 are enabled.
We will mainly be focusing on two cases: direct calls and MMU faults in the Qualcomm hypervisor
What happens when we transition states? When we transition states there are 3 system registers involved: SPSR_ELx, ELR_ELx, and ESR_ELx or the saved process state register, the exception link register, and the exception syndrome register.
Suppose we transiton to EL2, the PSTATE of the process before the transition is placed into SPSR_EL2, the return address (PC+4) is placed in ELR_EL2, and the reason why we go to EL2 is placed in ESR_EL2. When we return using the eret instruction, we restore SPSR_EL2 to PSTATE and ELR_EL2 to PC.
Another important question is where do we transition? That answer is dependent on the address in the register VBAR_ELx. Below is a table containing the offsets for each case:
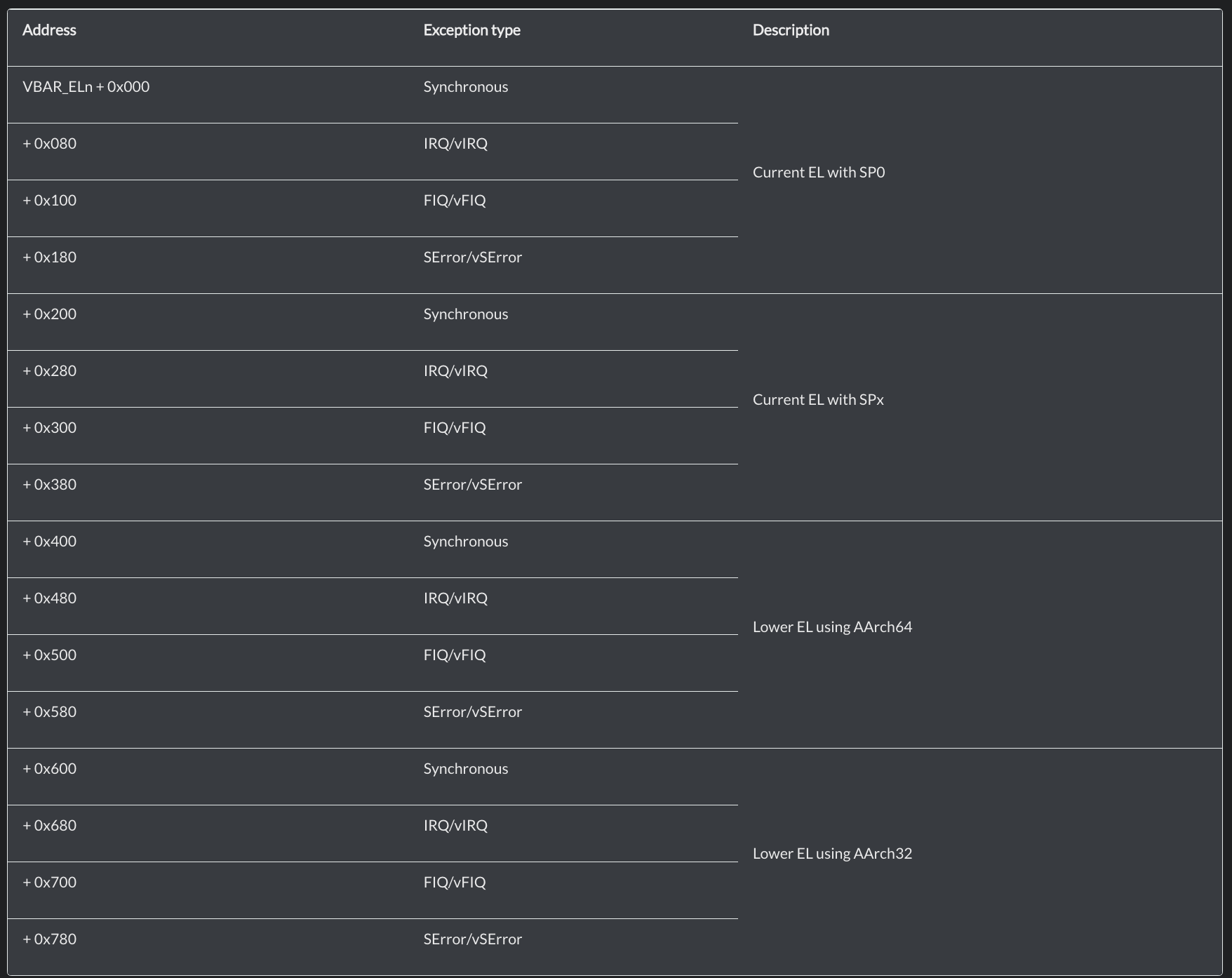
For example, suppose we perform an hvc instruction. Because an hvc instruction is a synchronous exception, we jump to VBAR_EL2+0x400 as we are coming from a lower EL in AArch64.